

여러 개로 분리돼 바닥을 기어 다니다 자갈길이나 암벽 등 장애물을 넘어야 할 때 하나로 합체되는 로봇이 개발됐다. 다양한 지형을 극복할 수 있어 재난 현장에서 생존자를 찾거나 향후 행성 표면을 탐사하는 작업도 수행할 수 있을 것으로 기대된다.
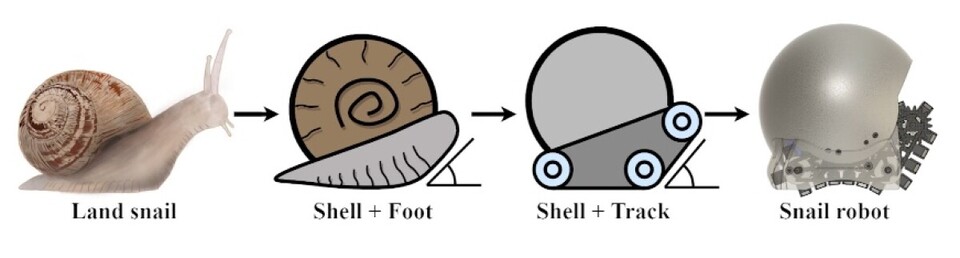
홍콩 중문대학교 연구진은 달팽이에서 영감을 받은 새로운 로봇을 개발해 국제학술지 '네이버'에 발표했다. 이 로봇은 달팽이처럼 기어 다니고, 접착 기능도 갖추고 있다. 달팽이와 같은 움직임과 특성을 제대로 구현한 셈이다. 일반적인 휴머노이드 로봇은 걸어 다니거나 뛰어 다닌다. 대다수 로봇은 사람과 함께 작업하거나, 생산 라인에 투입되는 것을 목표로 한다.


그렇기 때문에 매끄럽거나 평평한 표면에서 주로 실험이 진행됐다. 그러나 달팽이 로봇은 수평적인 움직임으로 험난한 지형을 다니기 때문에 수행할 수 있는 영역이 다양해 진다는 설명이다. 달팽이 로봇은 표면에 잘 달라붙으면서 스스로 움직일 수 있다. 필요할 때 멈출 수 있고 흡입력을 사용해 훨씬 더 강한 결합을 형성한다.
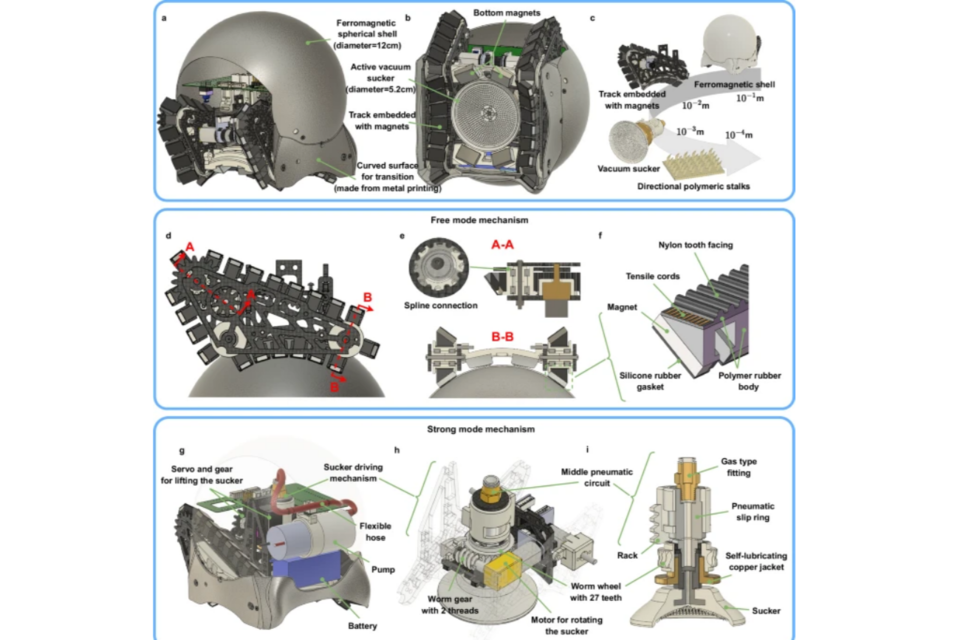
내부에는 배터리, 마이크로프로세서, 기타 전자 장치가 탑재돼 있다. 껍질의 바닥에는 자석이 내장된 고무로 제작된 탱크 모양의 트랙 세트가 내장됐다. '자유 모드'로 움직일 때는 흡입 기능이 작동하지 않는다. 암벽을 오르거나 상자를 옮겨야 하는 등 협동이 필요할 때는 흡입 기능이 작동된다. 다른 로봇의 껍질에 단단히 달라붙어 합체하는 게 이 로봇의 핵심이다.

현재까지 선반 오르기, 틈새 통과하기, 단일 로봇 팔 형성 등과 같은 작업이 진행됐다. 로봇들의 협력을 통해 계곡에 다리를 건설할 수 있고, 자갈길에서도 빠르게 걸을 수 있다는 것이 연구진의 설명이다.
휴머노이드 로봇이 통과하지 못하는 난간이나 틈새 등도 통과할 수 있어, 재난 현장에서 생존자를 찾는 데 활용될 수 있다는 설명이다. 향후 행성 표면을 탐사하는 작업도 수행할 수 있을 것으로 기대된다.
AI포스트(AIPOST) 조형주 기자 aipostkorea@naver.com