
미국 연구진이 딱딱한 물체를 단단히 쥐고, 구부러지기 쉬운 물체를 가볍게 쥘 수 있는 로봇손을 개발했다. 로봇손이 탑재된 휴머노이드 로봇들은 일상생활에서 접하는 다양한 물건을 자유자재로 다룰 수 있게 됐다.
존스홉킨스 대학 연구진은 인간 손의 자연스러운 구조를 모방한 로봇손을 개발했다고 밝혔다. 다양한 센서가 탑재됐으며 사용자의 신경에 피드백을 전달하는 시스템을 갖추고 있다. 이에 손을 쥐는 모양과 악력을 조절할 수 있다는 설명이다.
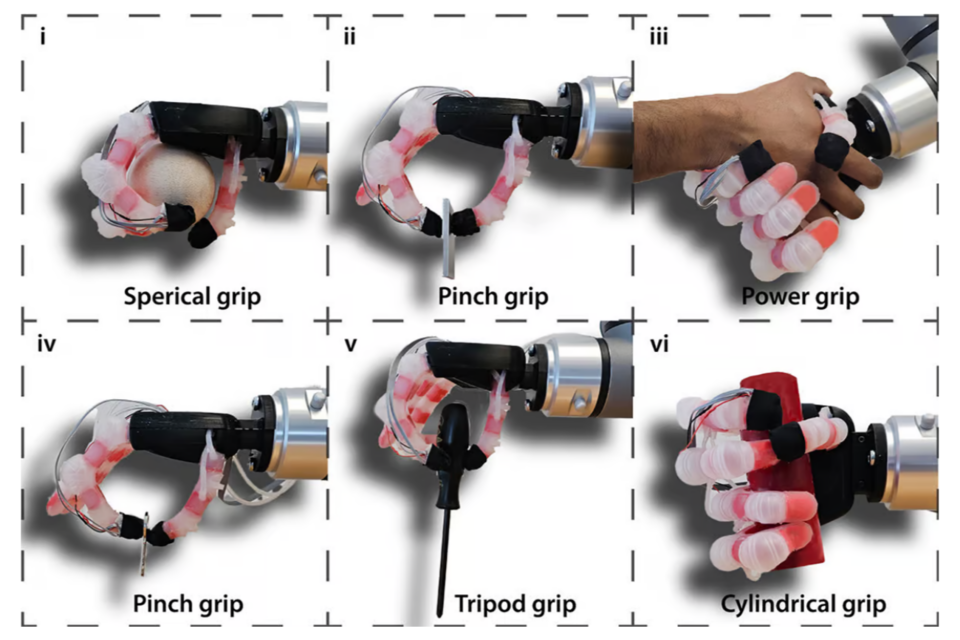
연구진은 사람 손가락의 움직임과 구조를 모사해 로봇손을 개발했다고 밝혔다. 연구진이 공개한 시연 영상에 따르면 로봇손은 장난감, 골판지 상자, 파인애플, 금속 물병, 물이 채워진 가벼운 플라스틱컵 등을 포함한 15가지 물체를 손상시키지 않고 집어 올렸다.
연구를 이끈 스리라마나 상카르 박사과정생은 "우리는 의수(義手)를 착용하는 환자들이 주변 환경과 안전하고 자유롭게 상호작용하고, 사랑하는 사람을 다치게 할까봐 걱정하지 않고 안을 수 있는 능력을 제공하고 싶다"라고 했다.
실제 로봇손은 인간의 손과 매우 흡사한 움직임을 보인다. 부드러운 고무와 특수 플라스틱인 폴리머를 사용해 만든 5개의 관절 손가락과 단단한 골격으로 이뤄졌다. 생체에서 영감을 받은 촉각 센서를 통해 다양한 물체를 제대로 인식하고 힘을 조절할 수 있는 구조다.
손가락에는 공기로 채워진 관절이 있어 팔뚝의 근육을 제어할 수 있다. 연구진은 로봇손을 개발하며 다양한 실험을 진행했고, 이를 인공지능(AI)에 학습시켰다.
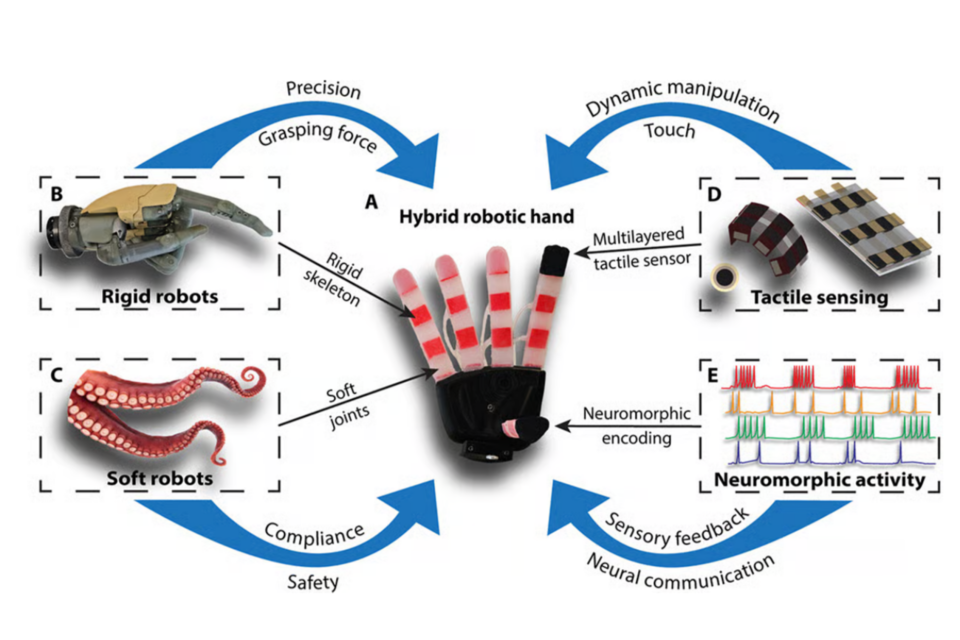
연구진은 "커피 한 잔을 들고 있다면, 그것을 떨어뜨릴지 어떻게 알 수 있을까. 컵이 미끄러진다는 신호를 뇌로 보내기 때문"이라며 "우리의 시스템은 신경에서 영감을 받았다. 손의 촉각 수용체를 모델링해 신경과 같은 메시지를 생성해 보철물의 '뇌' 또는 컴퓨터가 무언가가 뜨겁거나 차갑거나, 부드럽거나 딱딱하거나, 그립에서 미끄러지는지 이해하도록 한다"라고 설명했다.
연구진은 로봇손이 도입될 경우 산업현장에 도입된 로봇들의 활용도를 높일 수 있고, 손을 제대로 쓰지 못하는 환자들에도 도움이 될 것이라고 했다. 연구팀은 더 강한 악력, 더 많은 센서, 더 높은 품질의 소재를 추가하는 방안을 모색하는 등 장치의 성능을 더욱 향상시키기 위해 노력할 방침이다.
AI포스트(AIPOST) 유진 기자 aipostkorea@naver.com