
'로봇개'로 불리는 4족 보행 로봇을 산업에 활용하려는 시도가 잇따르고 있다. 군사용이나 물자 수송 등 다양한 응용 분야에 시범적으로 도입되고 있다. 이 과정에서 소총이나 화염방사기를 탑재한 로봇개까지 등장해 논란이 되기도 했다.
이처럼 경비, 보안, 군사용 등으로 활용하기 위한 연구가 주로 진행되다 보니, 일상에서 체감하기 어려운 국민들에게 로봇개는 먼 나라 이야기처럼 느껴질 수 있다. 최근 이탈리아의 한 연구진이 4족 보행 로봇을 활용해 쓰레기를 수거하는 영상을 공개해 화제다.
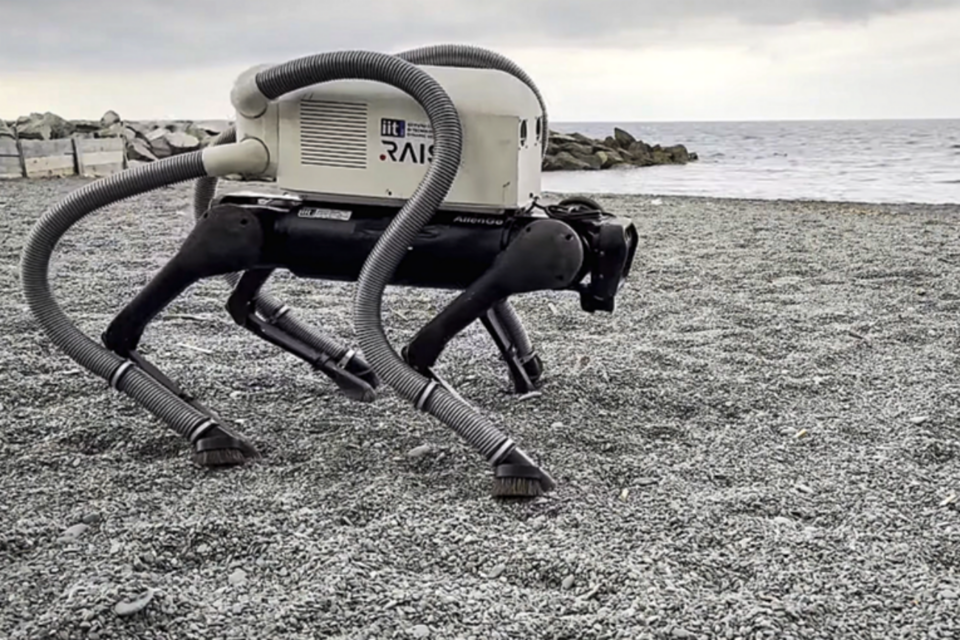
이탈리아 과학기술원(IIT·Italian Institute of Technology) 연구진은 학술지 플랫폼인 '와일리 온라인 라이브러리(Wiley Online Library)'에 진공청소기를 장착한 로봇개 베로(VERO)의 성능을 테스트한 연구 결과를 내놓았다.
연구진은 가장 흔한 쓰레기 중 하나인 담배꽁초를 대상으로 실험을 진행했다. 쓰레기 감지를 위한 합성 신경망을 사용해 바닥에 버려진 담배꽁초를 발견하고 진공청소기로 빨아들인 뒤 스스로 이동하는 경로를 계획하는 것이 연구진의 당초 목표였다.

이를 위해 연구진은 로봇개의 등에 청소기 몸체를 달고, 다리에 흡입기를 장착시켰다. 담배꽁초의 위치를 찾고 인식하기 위해 연구진은 비쥬얼 서보잉(Visual Servoing) 기법을 내장했다. 꽁초를 찾아내기 위한 최적의 위치에 장치들을 달았고, 이에 움직임을 멈추지 않고 수거 작업을 수행할 수 있게 됐다고 연구진은 설명했다.
연구진은 해변, 거리 등 다양한 공간에서 광범위한 테스트를 진행했다. 연구진은 베로 로봇에게 청소 구역을 지정하고, 로봇은 자율적으로 이동하며 꽁초를 탐지하고 수거했다. 카메라와 신경망을 활용해 꽁초를 찾는 모습을 보였다. 연구진은 아직 민첩하게 움직이진 못하지만, 쓰레기를 인식하고 수거하는 성능만큼은 성공적으로 구현됐다고 밝혔다.
한편 로봇개의 활용 범위를 넓히려는 연구가 속속 진행되고 있다. 최근 중국의 한 연구진이 신호등을 식별하고, 각종 장애물을 피할 수 있는 '시각장애인 로봇 안내견'을 공개한 바 있다. 로봇 안내견은 카메라와 센서를 통해 물리적 환경을 제대로 탐색할 수 있으며, 전통적인 안내견이 식별하지 못했던 교통 신호도 인식할 수 있다.

경로 계획 기능, 신호등 식별 등에 포함된 인공지능 기술과 음성 인식을 통해 시각장애인과 대화를 하며 목적지까지 향할 수 있다. 다리가 여섯 개로 제작됐기 때문에 최대한 안정적으로 시각장애인을 안내할 수 있다. 로봇개로 안내견 부족 문제를 해결할 수 있다는 게 연구진의 주장이다.
AI포스트(AIPOST) 유형동 수석기자 aipostkorea@naver.com